1. Positionsbestimmung durch Trilateration
Korrektur des Uhrenfehlers
Für das Verfahren der Trilateration zur Positionsbestimmung ist erforderlich, dass die Empfängeruhr und die Satellitenuhr synchron laufen.
Die GPS-Satelliten sind mit mehreren Atomuhren ausgestattet.
Quelle: Jörg Behrens, Wikimedia Commons
Da Atomuhren zu groß und zu schwer sind, werden in den GPS-Empfängern 1 bis 2 cm große Quarzoszillatoren eingebaut. Sie haben eine Ungenauigkeit von 10-6, welche für die Positionsbestimmung sehr groß ist.
Wird der Gangunterschied der Atomuhren und der Quarzozillatoren mit der Lichtgeschwindigkeit c multipliziert, mit der die Signale übertragen werden, so erhält man den Fehler Δr, der durch den Gangfehler Δt der Quarzoszillatoren auftritt:
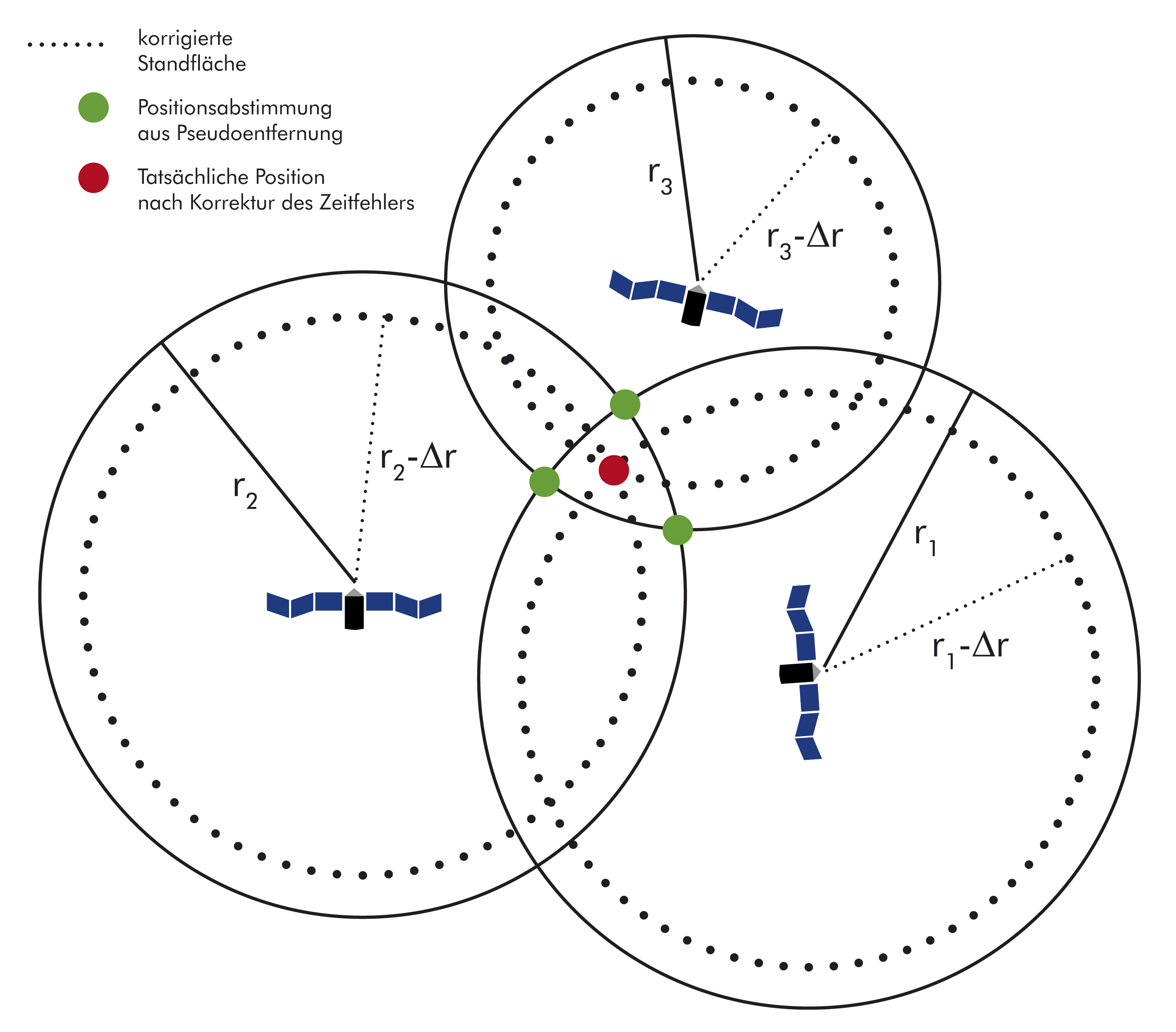
Alle Entfernungen sind mit dem gleichen Fehler Δr behaftet. Der Fehler führt dazu, dass keine eindeutige Positionsbestimmung möglich ist. Dies ist in der rechts gezeigten Abbildung zu erkennen.
Problem
Jeweils zwei Kreise schneiden sich in zwei Punkten.
Davon befindet sich nur einer auf der Erdoberfläche, sodass der andere
Schnittpunkt als Position ausgeschlossen werden kann. Der jeweils dritte
Kreis teilt diesen Punkt jedoch nicht.
Lösung
Um diese Ungenauigkeit zu korrigieren wird neben den drei Laufzeitmessungen zur Positionsbestimmung
eine weitere vierte Laufzeitmessung durchgeführt, welche die Uhrenungenauigkeit reduziert.
Nach Korrektur der Pseudoentfernung um den entsprechenden Wert Δr ist ein Schnittpunkt
der drei Standflächen wieder eindeutig. Die Position auf der Erde ist also eindeutig durch
vier Satelliten bestimmt.
